MEAM.Design - MEAM 248 - (PASSIVE-DYNAMIC) WALK(ING)
Overview
As you will see by the end of this project, it is possible to make a mechanism that can walk down a slight incline without external power. This is often referred to as passive dynamic walking.
Schedule and Deadlines
| 10 | Mar 12 | Project begins | ||
| 11 | Mar 19 | Background research brief | ||
| Mar 21 | Team formation (6:00 p.m.) | |||
| 13 | LEGO video | |||
| 14 | Apr | Simulation draft | ||
| 15 | Apr | Simulation second draft | ||
| 16 | Apr | Simulation final, walker demonstration |
The Goal
Imagine a long ramp, inclined just a few degrees from the horizontal. Your team's task will be to build a passive dynamic robot (bi- or tri-pedal) to walk as far down the ramp as possible using only gravitational energy. To accomplish this challenge, we will break this project into three distinct but overlapping sub-projects: iterative experimentation, simulation, and final design.
Background
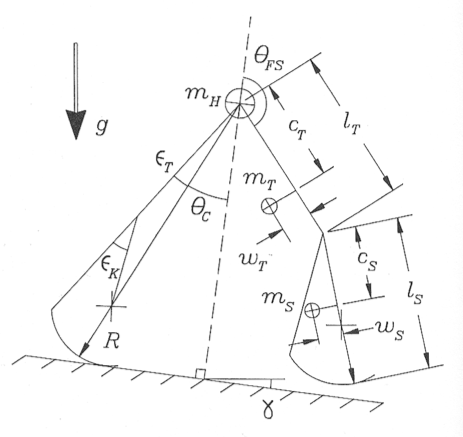
The seminal work in this field was done by Tad McGeer in the late 1980's. The primary results of this work were published in this International Journal of Robotics Research article. A quick google search should turn up many results within this domain (try google scholar, as well).
An Independent Understanding of Passive Dynamic Walking
Prepare a technical brief to explain passive dynamic walking to someone else in this class (i.e. - you can assume a decent understanding of sophomore-level dynamics). You must cite all sources. Submit a hardcopy of your brief at the beginning of lecture on Monday, March 19th.
Forming New Teams
Find two new teammates, and add your names here by 6:00 p.m on the above-stated deadline. Note - you cannot work with anyone from your LAUNCH team, and it would be good to have someone on your team who has taken MEAM 201. Those not listed on the page by the deadline will be randomly assigned.
The Ramp
A custom-built PDW ramp with an incline of X.X degrees and a series of evenly-spaced foot-swing cutouts (XYZ details) will be available for your use in M81 through the LEGO phase, and then in the main GM lab for the duration of the project, until it will be moved into the lecture hall for final demonstrations.
Iterative Design and Rapid Experimentation
Using the LEGOs available in M81, rapidly test and iterate various walker designs. The primary goal of this phase of the project is to gain some intuition about the dynamics of passive walking by observing the results of changes you make to a prototypical system. Take photos and videos to document your findings, and assemble a short video of your results. Upload the video to YouTube or Vimeo, and send a link in an email to medesign@seas.upenn.edu entitled 248-PDW-legos. If you are new to working with LEGO, take a look at this overview of Technic LEGOs before you begin.
Walking a-la-Matlab
Using Matlab, develop a dynamic simulation to show the planar profile of your passive dynamic robot walking down an incline. The graphics needn't be sophisticated - the emphasis is on capturing the dynamics as accurately as possible. You will have an opportunity to submit a draft of your simulation, followed by the pre-final submission, then the final submission. The overarching goal is to create a simulation that can be used to both inform and iterate upon your final design.
To submit your files, first create a readme.txt file to explain how your system works and highlight anything that you are struggling with, place this alongside all of your files in a single folder, rename it as pdw-teamnumber (please replace "teamnumber" with your team's teamnumber), zip the folder, and attach it to an email to medesign@seas.upenn.edu entitled 248-PDW-simulation.
Building Your Walker
Your passive dynamic walker must be less than 5 inches wide and 12 inches tall. It can be constructed from any primary materials (no LEGOs or other pre-manufactured members), including:
- sheet goods (you can order whatever you need from here)
- stainless steel shaft material (1/4" OD, 12" long, McMaster #1257K66 )
- flanged bushings (1/4" ID, 3/8" OD, 1/4" long PTFE/oil-impregnated SAE841 Bronze, McMaster #1677K1)
- straight bushings (1/4" ID, 3/8" OD, 1/4" long PTFE/oil-impregnated SAE841 Bronze, McMaster #1688K4)
- an assortment of fasteners (take what you need from the GM-lab ministore)
Demonstration/Competition
On the final day of class, we will hold a demonstration session where you will showcase your simulation and your robot will walk down the incline. You must submit your final simulation files before class according the format outlined in the Walking a-la-Matlab section above. We will begin each demonstration by running your simulation, where we will see the prediction of your robot's motion. You will then start your walker on the ramp. A passing grade will require at least X steps. Bragging rights (and better scores) will be awarded to teams who demonstrate better performance.
(image credit: Passive Walking With Knees, Tad McGeer, 1990, ICRA)