MEAM.Design - Senior Design - Team 05 (Cynthia, Mallory, Monica S., Monica T.)
Robotic Self-Feeder for Children with Cerebral Palsy
Our project is a collaborative effort between MEAM Senior Design and the HMS School for Children with Cerebral Palsy. 70-80% of all recorded cases are classified as spastic cerebral palsy (Dormans, 1998). This type is characterized by hypertonia, abnormal postures, and spasticity. As a result of these complications, among others, many cerebral palsied children face day-to-day feeding challenges. These children must be fed in a specific way and reminded to chew and to swallow. Unless a self-feeder is used, a specially trained aide must feed the child with cerebral palsy until he or she develops the required motor skills. This process can be time-consuming, difficult, and demeaning to cerebral palsied children. We will design and create a robotic feeding system for the students at the HMS School for Children with Cerebral Palsy. While some systems like this already exist, they are often expensive, easy to break, and have problems with food delivery.
Part 1 - Deliverables
(:toggle label="1.1 - Project Tender" hide part01:)
(:toggle label="1.2 - Project Proposal" hide part02:)
(:toggle label="1.3 - Design Report 1" hide part06:)
Part 2 - Design Details
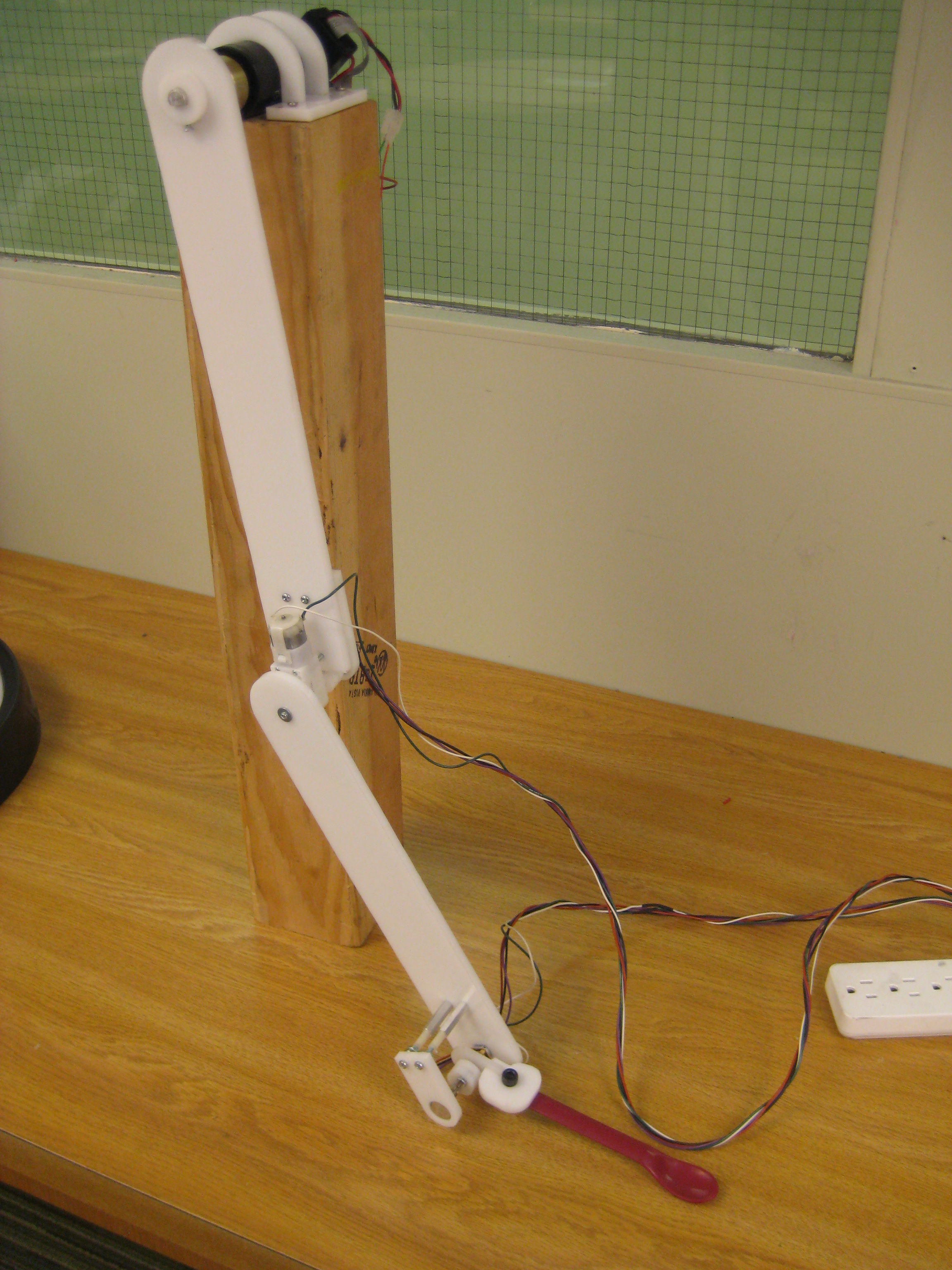
(:toggle label="2.1 - Mechanical Arm Design" hide part03:)
(:toggle label="2.2 - Electrical Systems and Configuration" hide part04:)
(:toggle label="2.3 - Food Pick-up System" hide part05:)
Contact Information
Advisor
(:commentboxchrono:)