MEAM.Design - MEAM 410 - Robodeo
Dates and Deadlines
The main public event is currently planned for the evening of Monday, December 13th.
Teams
To choose who you will be working with, add your names here.
Progress Check
To sign up for a meeting time, add your names here.
Regional Rodeo Qualifiers
We will hold a local qualifying tournament on Friday, December 10th during which you will have an opportunity to test everything out under competition conditions. This event will also be the formal grading/judging session. To sign up for testing times, add your names here.
National Robodeo Finals
Monday, December 13th. 5:30 p.m. Wu & Chen. Here we go: schedule of events.
Supplies and Fabrication
Motors - An order for motors will be placed on Thursday, November 18th. If you would like to be included in this order, send an email to medesign@seas.upenn.edu entitled 410-##-motors (where ## is your team number) and in the body of the email include the Pololu part number and quantity that you would like to order (Pololu carries a large selection of both metal gearhead motors and less expensive plastic gearhead motors). We will pay for express shipping, but the actual motor cost will be yours to bear.
Sheet goods - To obtain sheet goods, enter your request here. These will be fulfilled most evenings throughout the project.
3D printing - If you need something that can't be easily made any other way, you can submit parts for 3-d printing. To do so, send the CMB file in an email to medesign@seas.upenn.edu with the title "411-XX-print" (where ## is your team number). Unless you believe it's absolutely necessary, all parts should be processed at 0.010" layer resolution. If you want 0.007", please provide a thorough justification in your email. Parts must be sent in at least five days before the final event to guarantee enough time for printing.
The Events
Your team must enter at least two of the events described below. Prizes will be awarded for the top three finishers in each event, as well as the overall rodeo champion.
Bull Riding
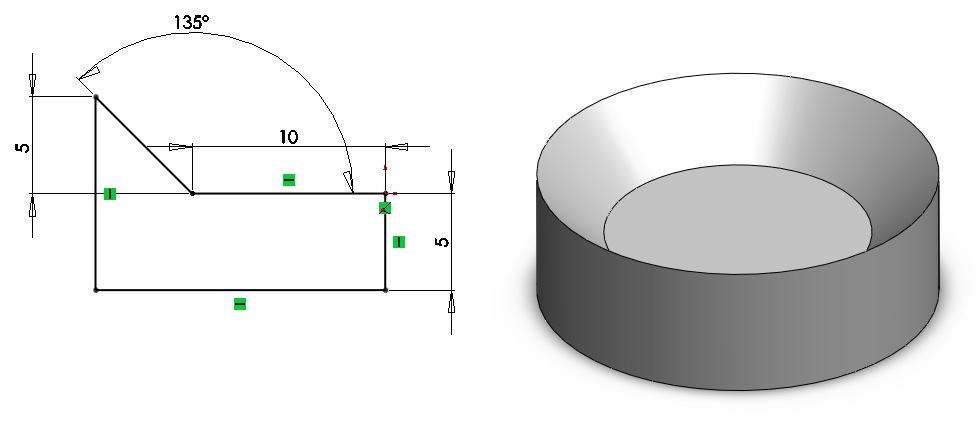
What rodeo would be complete without bull riding? This quintessential event will require your team to design and build a robot to mount atop a two-degree-of-freedom spherical servo joint which will move in a "random" pattern. The timer will begin when you let go of your device. The motion of the "bull" will become more violent over time. Your rider must only contact the bull through the conical "saddle" illustrated to the right, and your rider's CG must be at least 10 centimeters above the bottom surface of the saddle. Additionally, your rider's total mass must be less than 300 375 grams.
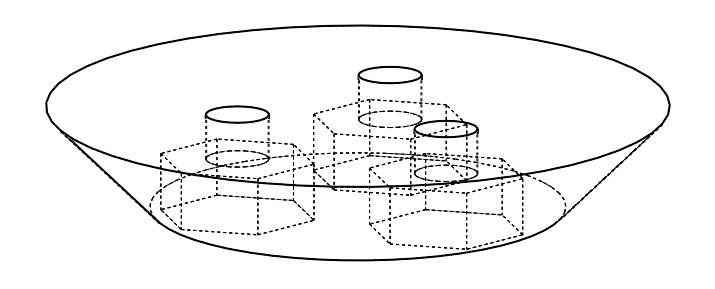
To even the playing field, we will be providing each rider with a standard 3D printed "buttocks" that matches the conical "saddle". It will include a pattern of three holes ( through holes for 4-40 bolts, evenly spaced on a 12mm diameter bolt circle). The underside has recesses for 4-40 hex machine nuts. This will be the only thing that will be allowed to touch the bull.
Steer Roping
The objective is to capture a rouge calf robot as quickly as possible. Here are the details:
The autonomous calf robot will be less than 15 centimeters in diameter with relatively smooth sides. It will have horns. A zip file containing the Solidworks drawings of the parts and the assembly can be found here. [Note: The assembly is missing the front caster wheel, the back bumper switch/tail, and contains a simplified version of the central main body.]
Your robot must be fully self-contained, autonomous, and must fit within a 25-centimeter circle at the beginning. To aid in calf-finding, each team to participate in this challenge will be give a single Maxbotics LV-MaxSonar-EZ3 ultrasonic ranger.
During competition, the calf will be placed at the center of a 150 to 200-centimeter circular rink, while your team's robot will be placed at one edge of the circle. The timer will start when a wireless packet is sent to your robot's address (found here). The wireless packet will include a three-byte message with a repeated value of "0xFF". After receipt of the packet, your robot is free to enter the rink. The timer will stop once you have "captured" the calf robot such that it is unable to move by more than 5 centimeters in any direction. Note that damage to the calf robot will result in your having to re-build the calf robot.
Barrel Racing
One robot, three barrels, and a timer. Sounds simple. Here are the details:
Your robot must be fully self-contained, autonomous, and must fit within a 15-centimeter circle at all times.
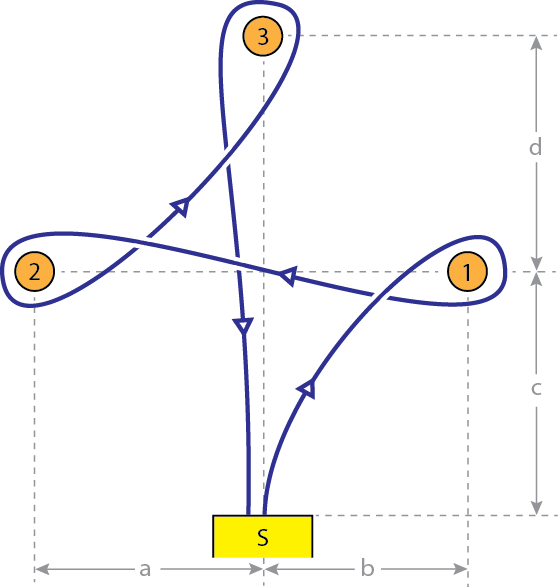
The field, as illustrated to the right, will consist of a starting area (S) into which you will place your robot, and three barrels. The exact spacing of the objects will be set at the start of the competition. The distances (a, b, c, d) will each be between 60 and 90 centimeters.
The barrels will have a diameter of 7 centimeters, and include a ring of 940-nm IR LEDs at a height of 60 millimeters from the ground. Your robot will be able to turn on or off the LEDs on a particular barrel by sending it a wireless packet. The addresses for the three barrels will be 0xB1, 0xB2, and 0xB3 for barrels 1, 2, and 3 respectively. To turn on the barrel, you should send a THREE-byte packet with a value of (0xFF, 0xFF, 0xFF). To turn off the barrel, you should send a THREE-byte packet with a value of (0, 0, 0). To aid in final navigation, a fourth IR emitter will be located in the starting corral. This will have a wireless address of 0xB4, and will follow the same protocol as the barrels.
The timer will start when a wireless packet is sent to your robot's address (found here). The wireless packet will include a three-byte message with a repeated value of "0xFF". After receipt of the packet, your robot is free to enter the course. After entry, your robot must move clockwise around barrel 1 and counter-clockwise around barrels 2 and 3. A 10-second penalty will be assessed for contact with each barrel. The timer will stop when your robot first crosses the start/finish line after rounding all of the barrels.