MEAM.Design - MEAM 410/510 - Resources
Commonly Used Component Datasheets
LTE-4206 - 3mm diamter 940nm (IR) LED
LTE-4208 - 5mm diamter 940nm (IR) LED
LTR-4206 - 3mm diamter 940nm (IR) phototransistor
MCP1700 - 250mA LDO voltage regulator (2.3-6.0V input)
MCP1702 - 250mA LDO voltage regulator (2.7-13.2V input)
A1321LUA - Hall-effect sensor
MMA7361L - 3-axis MEMS accelerometer
LY330ALH - 300 deg/s rate gyro
TIP31c - Complementary Silicon Power Transistor
LM358 - Dual Operational Amplifier
LM393 - General Purpose Comparators
LM555 - Timer IC (and some excellent simulators: square wave, sawtooth)
SC56-11GWA - Green 7+1 segment display
SignalQuest - Great sensors for detecting tilt, vibration, and shock. The SQ-SEN-200 can be used to sense movement in any direction.
Maxbotix LV-MaxSonar-EZ3 - Ultrasonic Rangefinder
SN754410 - Quadruple Half - H Driver
Motor Specs
(:toggle label="Faulhaber encoded right-angle DC gearmotor" hide faulhaber:)

Core - a Faulhaber 1524E006S123 brushed DC motor, with an 11 ohm coil, silver-alloy precious metal brushes, and a rated no-load speed of 13,400 RPM at 6V.
Gearhead - a true ratio of 140.759183:1 (approximately 141:1) using all-steel gears, heavy-duty lubricant, and pre-loaded ball bearings on the 3mm diameter output shaft. Attachment to the face of the gearhead can be done using either M2 or 2x56 screws on 10.92 mm diameter bolt circle.
Right-Angle Gearbox - includes two bevel gears, two decent ball bearings, and a small timing belt pulley on a 3mm shaft. The set screws accommodate 0.9mm hex keys.
Hall-Effect Encoder - an HES164A single-line quadrature encoder.
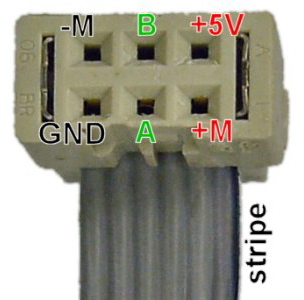
The Connector - pinout is shown below. M- and M+ are the motor power, +5V and GND are the power for the encoder, and A and B are the two quadrature encoder channels.
(Faulhaber images from http://www.robotroom.com/FaulhaberGearmotor.html)
(:toggle label="Sayama 12SM-AT3 DC gearmotor" hide sayama:)

This Sayama 12SM-AT3 brushed DC gearmotor has a 60-ohm coil, and will output approximately 58 RPM at 12VDC. The output shaft diameter is 2mm.
(:toggle label="Buehler 1.61.046.514.01 gearmotor" hide buehler:)

voltage range: ? to 24V
no-load speed: 225 RPM @ 12V
no-load current: 0.08 A
shaft: 5mm D-type x 22mm long
mounting holes: three (the bottom two are approximately 0.40" to either side of the motor shaft, while the third is approximately 0.86" above the motor shaft)
Off-site References
NYU Introduction to Physical Computing - lots of electronics resources and tutorials
Ansi C Reference Card (thanks to Ian O. for finding this!)
Standard AVR Libraries (thanks to Kartik for finding this!)
Like Github for circuit diagrams
H-Driver Walkthrough - NYU Lab (thanks to Andrew M. for finding this!)